Ведущие ученые:
| Каляев Игорь Анатольевич | главный научный сотрудник, академик РАН, профессор, д.т.н.; |
| Капустян Сергей Григорьевич | заместитель директора по производству, заведующий лабораторией МИУС интеллектуальных робототехнических комплексов, д.т.н.; |
| Коробкин Владимир Владимирович | IT-директор, заведующий лабораторией МИУС мехатронных комплексов, к.т.н.; |
| Мельник Эдуард Вседолодович | заведующий лабораторией программного обеспечения МИУС, д.т.н. |
E-mail: skapustyan@sfedu.ru
Направление «Многопроцессорные и нейросетевые информационно-управляющие системы» включает следующие поднаправления:
- многопроцессорные информационно-управляющие системы интеллектуальных робототехнических комплексов;
- многопроцессорные информационно-управляющие системы мехатронных комплексов;
- высоконадежные сетевые информационно-управляющие системы с децентрализованным диспетчированием;
- нейросетевые системы и технологии.
МИУС интеллектуальных робототехнических комплексов
Робототехника в настоящее время развивается все большими темпами. Еще недавно промышленные роботы, работающие на сборочном производстве, казались чем-то фантастическим, а сегодня роботы применяются практически во всех сферах человеческой деятельности. Еще 30 лет назад роботы могли выполнять простые действия в строго организованной среде, а настоящее время роботы способны свободно ориентироваться в незнакомой среде, без участия человека выполнять достаточно сложные действия в динамически изменяющихся условиях, самообучаться. Уже не далеко то время, когда роботы в своей деятельности будут руководствоваться «законами робототехники», придуманными фантастом Айзеком Азимовым.
Более 30 лет в НИИ МВС ЮФУ ведутся фундаментальные и прикладные исследования в области создания систем управления интеллектуальных мобильных роботов (ИР). Интеллектуальный мобильный робот – это техническая система, способная автономно двигаться к цели в заранее неизвестной среде без помощи человека. В НИИ МВС ЮФУ был предложен принципиально новый подход к проблеме построения систем управления ИР, отличительной особенностью которого является использование для решения задач управления ИР однородных нейроподобных структур, реализующих нецифровые методы обработки информации, присущие мозгу человека.
В результате проведенных исследований разработаны теоретические и практические основы построения информационно-управляющих систем ИР на базе однородных нейроподобных структур; разработаны методы планирования и управления целенаправленным поведением интеллектуальных роботов, предназначенных для автономного функционирования в заранее неизвестных, реальных средах; разработаны методы формирования и накопления динамических баз знаний о ситуации в среде на основе комплексированной сенсорной информации и методы распараллеливания процессов обработки сенсорной информации, принятия решений и управления в многопроцессорных управляющих системах интеллектуальных мобильных роботов.
 |
| Интеллектуальный мобильный робот в процессе испытаний на Камчатке |
Проведенные теоретические исследования послужили основой для создания ряда экспериментальных образцов ИР, предназначенных для исследования поверхности других планет Солнечной системы, в частности Марса, в рамках российской космической программы. Данные работы проводились совместно с ВНИИ транспортного машиностроения (г. С.-Петербург).
Экспериментальные образцы ИР прошли успешные испытания в условиях, приближенных к реальным, на полуострове Камчатка, подтвердившие работоспособность и эффективность заложенных в них принципов.
Однако одиночный робот, каким бы интеллектуальным он ни был, может использоваться только для решения некоторых частных задач, либо выполнения довольно простых операций, поскольку он, как правило, обладает сравнительно малыми возможностями для выполнения поставленной задачи (небольшой радиус действия, ограниченный бортовым энергоресурсом; небольшое число выполняемых функций, ограниченное набором исполнительных устройств, невысокая вероятность выполнения поставленной задачи при функционировании в экстремальных ситуациях, поскольку выход из строя одиночного робота ведет к невыполнимости его миссии и т.п.). Поэтому более эффективным является решение сложных задач одновременно несколькими роботами, т.е. группой роботов. При групповом использовании роботов резко увеличивается радиус действия за счёт рассредоточения роботов по всей рабочей зоне, расширяется набор выполняемых функций, что обеспечивается путём установки на отдельных роботах группы исполнительных устройств различных типов. Достигается более высокая вероятность решения поставленной задачи, за счет перераспределения целей между роботами группы в случае выхода из строя некоторых из них. Именно поэтому, такие сложные задачи как сборка сложных конструкций на Земле, в космосе или под водой, участие в боевых и обеспечивающих операциях, разминирование территорий, поиск и эвакуация раненых из зон техногенных или природных катастроф и т.п. могут быть успешно решены роботами только при их групповом использовании.
Группой роботов называется совокупность однотипных, то есть имеющих одинаковую конструкцию, одинаковое функциональное назначение и функциональные возможности, или разнотипных, имеющих разную конструкцию, разное функциональное назначение и, соответственно, разные функциональные возможности, роботов, объединенных общей целевой задачей.
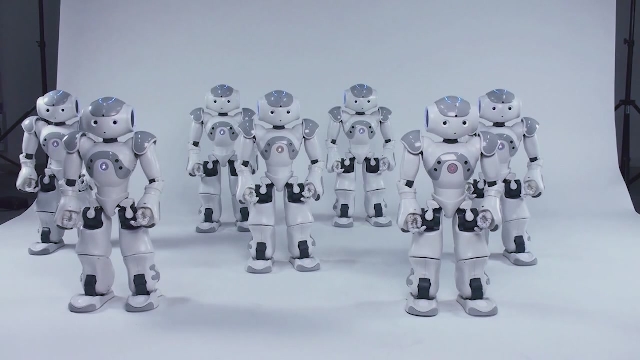 |
| Группа роботов |
При групповом использовании роботов различного назначения возникает ряд весьма сложных задач, в первую очередь, связанных с проблемой управления ими и организацией взаимодействия роботов группы между собой для наиболее эффективного достижения цели, поставленной перед группой.
Задачу управления роботами группы по достижению групповой цели принято называть задачей группового управления. Суть задачи группового управления заключается в отыскании и реализации таких действий каждого отдельного робота группы, которые приводят к оптимальному, с точки зрения некоторого критерия, достижению общей групповой цели.
Для решения задачи группового управления роботами могут быть предложены различные подходы, базирующиеся на использовании различных стратегий управления, среди которых можно выделить диаметрально противоположные стратегии – централизованного и децентрализованного управления. В первом случае эта задача решается одним, сосредоточенным (центральным) устройством управления. Во втором случае решение осуществляется некоторым, распределенным по роботам группы устройством управления.
В настоящее время проблеме группового управления роботами посвящено большое число исследований, проводимых в странах Западной Европы, США, Японии и России, и в большинстве случаев ученые делают вывод, что наиболее эффективными подходами к решению данной проблемы, являются подходы, базирующиеся на использовании децентрализованных стратегий группового управления, суть которых заключается в том, что центральное устройство управления отсутствует, а каждый робот группы самостоятельно принимает решение о своих действиях, пытаясь при этом внести максимально возможный вклад в достижение общей, групповой цели. Децентрализованные системы имеют ряд преимуществ по сравнению с централизованными.
Во-первых, задача, решаемая каждым элементом системы (в нашем случае роботом), будет не сложной, поскольку он решает задачу оптимизации только своих действий, не пытаясь оптимизировать действия всей системы в целом. Поэтому решение может осуществляться быстро в реальном масштабе времени изменения ситуации в среде.
Второе преимущество децентрализованных систем – это высокая живучесть группы и высокая вероятность достижения поставленной цели. Действительно, поскольку в них нет центрального устройства управления, то все элементы системы равны, и поэтому выход из строя или уничтожение любого из них не приводит к выходу из строя всей системы в целом. При этом такая высокая живучесть системы достигается без каких-либо дополнительных затрат, а только лишь за счет самой децентрализованной и возможности реконфигурирования.
В-третьих, децентрализованные системы обладают потенциальной возможностью развития и усложнения решаемых задач путем наращивания мощности (масштабирования системы).
Кроме того, развитие сетевых технологий, в т.ч. и использующих беспроводную связь, создает предпосылки для создания территориально распределенных децентрализованных систем группового управления роботами, представляющих собой совокупность устройств управления отдельных роботов, объединенных каналами связи в информационно-вычислительную сеть.
Существует целый круг целевых задач, которые не могут быть разбиты на отдельные подзадачи, решаемые роботами группы автономно, а требуют определенным образом организованного взаимодействия роботов друг с другом. Такое взаимодействие принято называть коллективным (многие ученые на Западе называют его командным). Задачами, требующими коллективного взаимодействия, например, являются: сборка роботами сложных конструкций под водой и в космосе, разборка завалов, транспортировка объектов несколькими мобильными роботами в не организованной среде и т.п. Наиболее иллюстративной в плане коллективного взаимодействия является игра роботов в футбол.
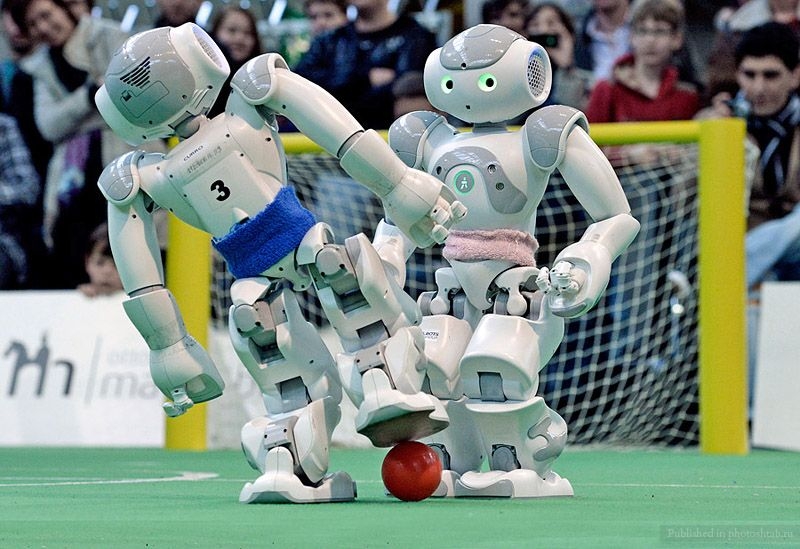 |
| Роботы играют в футбол |
В Научно-исследовательском институте многопроцессорных вычислительных систем имени академика А.В. Каляева Южного федерального университета (НИИ МВС ЮФУ) был разработан и развивается подход к решению проблемы группового управления, основанный на использовании стратегии коллективного управления.
Коллективным называется управление, в выработке которого участвуют все члены коллектива.
Коллективное управление используется в группах людей, решающих одну или несколько взаимосвязанных целевых задач, но не имеющих в своем составе явно выраженного командира или начальника.
Коллективное управление по своей сути является децентрализованным.
Для того чтобы эффективно функционировать в условиях быстро изменяющейся недетерминированной ситуации, такие коллективы должны руководствоваться некоторыми принципами коллективного управления, которые легли в основу разработанного подхода и заключаются в следующем:
— каждый член коллектива самостоятельно определяет свои действия в текущей ситуации;
— выбор действий членами коллектива осуществляется только на основе информации о цели, стоящей перед коллективом, ситуации в среде в текущий момент времени и текущих состояниях и действиях других членов коллектива;
— в качестве оптимального действия каждого члена коллектива в текущей ситуации понимается такое действие, которое вносит максимально возможный вклад в достижение общей (коллективной) цели;
— допускается принятие компромиссных решений, удовлетворяющих всех членов коллектива, то есть каждый член коллектива может отказываться от действий, приносящих ему максимальную выгоду, если эти действия приносят малые выгоды или даже наносят ущерб коллективу в целом.
В основу метода коллективного управления роботами, реализующего предложенный подход, положена итерационная процедура оптимизации коллективных действий, в рамках которой в каждом цикле роботы пытаются выбрать такие свои действия, которые бы вносили максимальный в текущей ситуации вклад в достижение коллективной цели. Было доказано, что число итерационных циклов не превышает числа роботов в коллективе, что позволяет использовать данный метод для решения задач группового управления роботами в реальном времени.
 |
| Роботизированный склад |
В частности данный метод, например, применяется для управления роботизированными транспортно-складскими комплексами, где нужно организовать взаимодействие между роботами-штабелерами, транспортными роботами и конвейерными линиями таким образом, чтобы минимизировать время обработки случайным образом формируемого потока заявок на перемещение грузов.
Как оказалось предложенный подход может эффективно использоваться не только для решения задач управления коллективами роботов, но и для организации вычислительного процесса в вычислительных сетях, организации взаимодействия в сетях интеллектуальных датчиков и т.п.
Развитие микроэлектроники в направлении миниатюризации электронных устройств при их возрастающей сложности позволяет существенно уменьшать размеры роботов и их стоимость, создает возможности широкого применения больших, насчитывающих сотни, а то и тысячи единиц, групп мини- и микророботов.
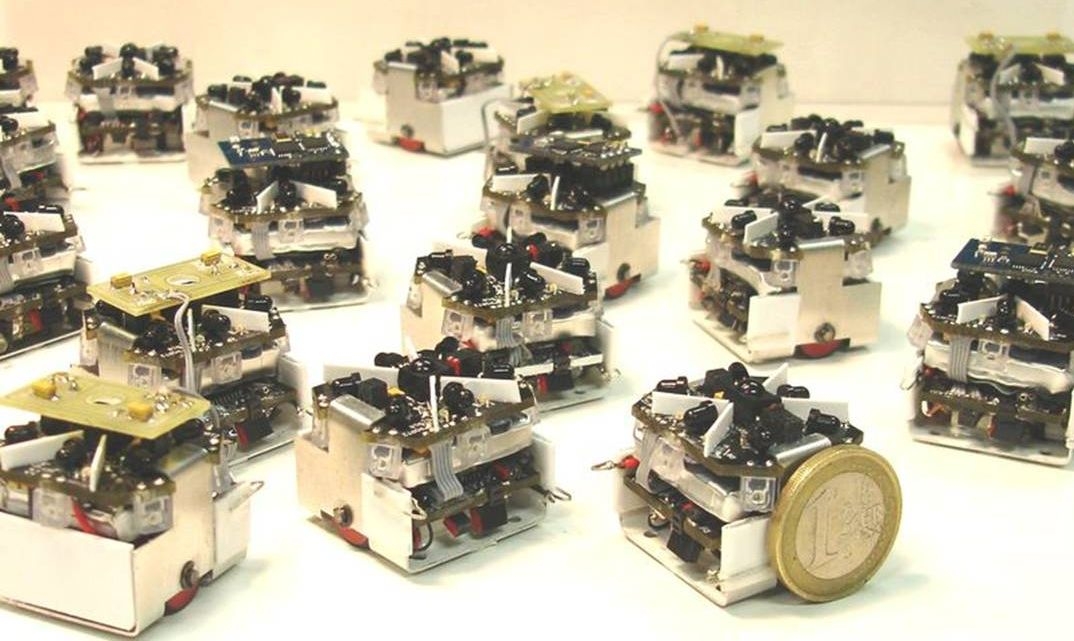 |
| Группа микророботов |
Однако здесь возникает ряд проблем. Во-первых, это проблема управляемости, то есть проблема управления большой группой роботов в реальном времени. Во-вторых, это проблема информационных обменов, которая обусловлены большими объемами передаваемой по каналам связи информации, ограниченной дальностью действия каналов связи при значительной территориальной распределенности роботов группы. В-третьих, это проблема ограниченных функциональных возможностей роботов, обусловленная их малыми размерами. Как правило, малоразмерные роботы могут выполнять более простые действия, чем их большие собратья.
Так как коллективное управление требует организации информационного обмена между всеми роботами группы, то применение его для управления большими группами малоразмерных роботов с учетом перечисленных выше проблем, может оказаться просто не эффективным.
В НИИ МВС ЮФУ был предложен подход, в основу которого положены принципы самоорганизации и роевого взаимодействия, когда каждый робот взаимодействует только с ближайшими соседями, с которыми он может обмениваться информацией. В результате все множество роботов большой группы разбивается на пересекающиеся подмножества соседей. Внутри подмножества соседей может быть реализовано коллективное взаимодействие, но так как каждый робот может входить в несколько подмножеств, то это взаимодействие распространяется на всю группу в целом, при этом обеспечивается сложное поведение группы, хотя каждый робот выполняет достаточно простые действия, согласованные только с соседями.
 |
| Группа квадрокоптеров |
Работоспособность и эффективность подхода была проверена на модельной задаче формирования и поддержания в процессе движения строя пока еще относительно небольшой группой малоразмерных беспилотных летательных аппаратов – квадрокоптеров.
Дальнейшим направлением развития принципов группового взаимодействия объектов является стайное управление. Стайные принципы поведения широко используются в живой природе (муравьи, осы, волки и т.д.). Считается, что стайный принцип будет наиболее эффективным принципом действий в вооруженных конфликтах будущего.
В НИИ МВС ЮФУ разработаны теоретические основы построения децентрализованных систем группового управления, использующих принципы стайного взаимодействия. Системы данного типа отличаются повышенной живучестью и позволяют группе объектов достигать стоящей перед ними цели в условиях неопределенности путем выбора каждым объектом самостоятельных действия с учетом возможностей всей стаи в целом.
Разработанные в НИИ МВС ЮФУ принципы коллективного, роевого и стайного взаимодействия находят применение не только при групповом управлении роботов. Данные принципы были также использованы при организации распределенных вычислений в компьютерных сетях, в частности, на основе принципов коллективного взаимодействия были разработаны мультиагентные системы поиска и обработки информации в сети Интернет, а также методы распределения ресурсов сети при решении сложных задач.
Основные публикации по поднаправлению «Многопроцессорные информационно-управляющие системы интеллектуальных робототехнических комплексов»:
1. Kaliaev I. Control System of Intelligent Autonomous Vehicle Planet-Rover // Proc. of the 3-rd IFAC Symposium of Intelligent Autonomous Vehicles, March, Madrid, Spain, 1998, vol.2. pp.491-494.
2. Kaliaev I. Homogeneous neurolike structures in Control Systems of Intelligent Mobile Robots // Proc. of the IEEE Inter. Conf. «Robotics and Automation». May, 16-20, Leuven, Belgium, 1998. pp.2536-2540.
3. Каляев И.А., Капустян С.Г., Усачев Л.Ж. Основы построения распределенных систем управления коллективами роботов // Информационные технологии. № 5, 1998.- с.13-18.
4. Каляев И.А., Гайдук А.Р. Принципы построения систем планирования поведения интеллектуальных роботов на базе однородных нейроподобных структур //Мехатроника, №3, 2000.-С.21-26.
5. Каляев И.А., Гайдук А.Р. Однородные нейроподобные структуры в системах выбора действий интеллектуальных роботов.-М.: Изд-во «Янус-К», 2000.- 279 с.
6. Каляев И.А. Принципы организации децентрализованных систем управления коллективов микророботов //Мехатроника, №6, 2000.-С16-26.
7. Каляев И.А. Однородные нейроподобные структуры в системах выбора действий интеллектуальных мобильных роботов //Нейрокомпьтеры. Разработка. Применение.-№7‑8, 2001.-С.51-73.
8. Каляев И.А. Использование принципов коллективного принятия решений при распределении потока задач в компьютерных сетях. Информационные технологии, №6, 2002.-с.82-85.
9. Каляев И.А., Гайдук А.Р., Капустян С.Г. Распределенные системы планирования действий коллективов роботов. – М.: Янус-К, 2002. – 292с.
10. Каляев И.А. Метод коллективного управления группой объектов //Мехатроника, Автоматизация, Управление, 2003. №3. С. 9–22.
11. Капустян С.Г., Вьюшин А.А. Распределенная система управления группой роботов-штабелеров //Мехатроника, Автоматизация, Управление, 2003. №3. С. 22–28.
12.Каляев И.А. Алгоритм кластеризации массово-применяемых микророботов //Мехатроника, Автоматизация, Управление, 2003. №4. С. 9-14.
13. Каляев И.А. Стайные принципы управления в группе объектов //Искусственный интеллект, №3, 2004 г., Украина, С. 700-714.
14. Капустян С.Г. Метод организации мультиагентного взаимодействия в распределенных системах управления группой роботов при решении задачи покрытия площади //Искусственный интеллект, №3, 2004 г., Украина, С. 715-727.
15. Каляев И.А., Гайдук А.Р. Стайные принципы управления в группе объектов //Мехатроника, Автоматизация, Управление, 2004. №12. С. 29–33.
16. Капустян С.Г. Многоуровневая организация коллективного взаимодействия в группах интеллектуальных роботов //Известия ТРТУ. Тематический выпуск «Интеллектуальные и многопроцессорные системы, Таганрог: 2004, №9.–С.149–158.
17. Капустян С.Г., Бондарев Ю.П. Методы организации локальной координации действий в больших группах микророботов //Известия ТРТУ. Тематический выпуск «Интеллектуальные и многопроцессорные системы», Таганрог: 2004, №9.–С.158–167.
18. Гайдук А.Р., Каляев И.А., Капустян С. Г. Управление коллективом интеллектуальных объектов на основе стайных принципов //Вестник ЮНЦ РАН, т. 1, выпуск 2, 2005.– С. 20-27.
19. Капустян С.Г. Децентрализованный метод коллективного распределения целей в группе роботов // Известия высших учебных заведений. Электроника, 2006, №2, МИЭТ, С. 84-91.
20. Капустян С.Г. Алгоритмы коллективного улучшения плана в задачах группового управления роботами //Искусственный интеллект, №3, 2006 г., Украина, С. 409-420.
21. Гандурин В.А., Капустян С.Г., Мельник Э.В. Алгоритм коллективного улучшения плана в задачах распределения ресурсов многопроцессорных информационно-управляющих систем /Вестник компьютерных и информационных технологий, №12, 2007.- C. 40-50.
22. Каляев И.А., Капустян С.Г. Проблемы группового управления роботами // Мехатроника, Автоматизация, Управление. 2009, №6.– С. 33-40.
23. Капустян С.Г., Кулиничев Р.Н. Групповое управление оборудованием автоматизированных складских систем // Мехатроника, Автоматизация, Управление. №9, 2009.– С. 19-25.
24. Каляев И.А., Гайдук А.Р., Капустян С.Г. Модели и алгоритмы коллективного управления в группах роботов.– М.: ФИЗМАТЛИТ, 2009.– 280 с.
25. Каляев И.А., Гайдук А.Р., Капустян С.Г. Самоорганизация в мультиагентных системах. // Известия ЮФУ. Технические науки.– Таганрог: Изд-во ТТИ ЮФУ, 2010. №3(104).– С. 14-20.
26. Каляев И.А., Гайдук А.Р., Капустян С.Г., Самоорганизующиеся системы группового управления интеллектуальными роботами // Мехатроника, автоматизация, управление, №12, 2010.– С. 47-52.
27. Иванов Д.Я. Информационный обмен в больших группах роботов // Искусственный интеллект.– Донецк: Наука i освiта, 2010. №4.– С. 513-522.
28. Каляев И.А., Капустян С.Г., Гайдук А. Р. Самоорганизующиеся распределенные системы управления группами интеллектуальных роботов, построенные на основе сетевой модели // Управление большими системами. Специальный выпуск 30.1 «Сетевые модели в управлении». М.: ИПУ РАН, 2010. С.605-639.
29. Интеллектуальные системы управления: кол. монография / под ред. акад. С.Н. Васильева. Каляев И.А., Гайдук А.Р., Капустян С.Г. Самоорганизация в группах интеллектуальных технических объектов. – М.: Машиностроение, 2010. – 544 с. (стр. 177-188)
30. Иванов Д.Я. Методы роевого интеллекта для управления группами малоразмерных беспилотных летательных аппаратов // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления».– Таганрог: Изд-во ТТИ ЮФУ, 2011. №3(116).– С. 221-229.
31. Каляев И.А., Капустян С.Г. Групповое управление роботами: проблемы, решения // Известия высших учебных заведений. Машиностроение. Специальный выпуск: «Специальная робототехника и мехатроника». 2011. М.: МГТУ им. Н.Э. Баумана. С.3-12.
32. Иванов Д.Я. Использование принципов роевого интеллекта для управления целенаправленным поведением массово-применяемых микророботов в экстремальных условиях // Известия высших учебных заведений. Машиностроение.– М.: МГТУ им. Н.Э. Баумана. 2011. №9. С. 70-78.
33. Kaliaev I., Kapustjan S., Ivanov D. Decentralized Control Strategy within a Large Group of Objects Based on Swarm Intelligence // Int. Conf. on Robotics, Automation and Mechatronics, September 17-19, 2011, Qingdao, China. pp. 299-303.
34. Гайдук А.Р., Капустян С.Г. Самоорганизующийся алгоритм действий интеллектуальных автономных роботов //Наука и образование на рубеже тысячелетий: сборник НИР. Вып.1.– М.: Учлитвуз, 2011, С. 7-17.
35. Дьяченко А.А. Задача формирования строя в группе БПЛА // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». №3 (128), 2012. С. 22-30.
36. Капустян С.Г. Методы самоорганизации распределенных информационно-управляющих систем интеллектуальных мультиробототехнических комплексов // Вестник компьютерных и информационных технологий. №3 (93), 2012. С. 35-41.
37. Иванов Д.Я. Формирование строя группой беспилотных летательных аппаратов при решении задач мониторинга // Известия ЮФУ. Технические науки. Тематический выпуск «Комплексная безопасность сложных систем». №4(129), 2012. С. 219-224.
38. Капустян С.Г., Дьяченко А.А. Распределенная информационно-управляющая система автоматизированного мультиробототехнического транспортно-складского комплекса // Мехатроника, автоматизация, управление. №7, 2012. С. 34-39.
39. Гайдук А.Р. Управление группой беспилотных летательных аппаратов с ограничением на управление и переменные состояния // Мехатроника, автоматизация, управление. №7, 2012. С. 52-57.
40. Гайдук А.Р., Капустян С.Г. Концепция построения систем коллективного управления беспилотными летательными аппаратами // Информационно-измерительные и управляющие системы. №7, 2012. С. 8-16.
41. Шаповалов И.О. Распределенная система управления движением группы крупногабаритных объектов // Известия Южного федерального университета. Технические науки. 2013. № 2. С. 41-46.
42. Каляев И.А., Капустян С.Г. Коллективы роботов: миссия выполнима! // Интеллект Технологии, 2013, №1(5). – М.: ИД «МедиаЛайн» – С. 80-85.
43. Иванов Д.Я. Решение строевой задачи в группе беспилотных квадрокоптеров // Известия ЮФУ. Технические науки. Тематический выпуск: «Комплексная безопасность сложных систем». №8 (157). 2014. С. 138-147.
44. Гайдук А.Р., Капустян С.Г., Меркулов В.И., Бесклубова К.В. Групповое управление БЛА // Информационно-измерительные и управляющие системы. 2014, №11. С. 24-36.
45. Ivanov D., Kaliaev I., Kapustyan S. Method of Circles for Solving Formation Task in a Group of Quadrotor UAVs // 2nd International Conference on Systems and Informatics, ICSAI 2014, art. no. 7009292, pp. 236-240.
46. Каляев И.А., Гайдук А.Р., Капустян С.Г. Управление группой БЛА в задаче формирования строя // Робототехника и техническая кибернетика. – С-Пб.: Изд-во ЦНИИ РТК, 2014, №4. С.28-39.
47. Ivanov, D., Kalyaev, I., Kapustyan, S. Formation task in a group of quadrotors (2015) Advances in Intelligent Systems and Computing, 345, pp. 183-191. DOI: 10.1007/978-3-319-16841-8_18.
48. Gaiduk, A., Kapustyan, S., Shapovalov, I. Self-organization in groups of intelligent robots (2015) Advances in Intelligent Systems and Computing, 345, pp. 171-181. DOI: 10.1007/978-3-319-16841-8_17.
49. Иванов Д.Я. Формирование строя в большой группе мобильных роботов с использованием метода паттернов // Робототехника и техническая кибернетика. – 2016. №2 (11). С. 39-44.
50. Ivanov D., Kapustyan S., Kalyaev I. Method of Spheres for Solving 3D Formation Task in a Group of Quadrotors // Interactive Collaborative Robotics. First International Conference, ICR 2016, Budapest, Hungary, August 24-26, 2016, Proc. Book «Lecture Notes in Computer Science», vol. 9812 2016. Springer International Publishing Switzerland. 2016. pp. 124-132.
51. Иванов Д.Я. Перспективы применения блокчейн-технологии в групповой робототехнике // Робототехника и техническая кибернетика Т7, № 4, 2019, С. 300-305.
52. Иванов Д.Я. Распределенные вычисления с использованием элементов концепции туманных вычислений в коалициях роботов в условиях ограниченных коммуникаций // Известия ТулГУ. Технические науки. 2020. Вып. 2, С. 284-295.
53. Korovin I.S., Ivanov D.Y., Semenistyi S.A. The Algorithm of Distributed Database for Multi-agent Interaction // Сборник статей конференции ACAI — 2019, рp. 303-307.
54. Korovin I.S., Ivanov D.Y., Semenistyi S.A. Development of Method of Organization and Algorithm of Distributed DSS Nodes Interaction During Their Team Operation // Материалы конференции ACAI — 2019, рp. 398-402.
55. Ivanov, D. Algorithms for Multi-agent Interaction in the Distribution of Robots in a Group Between Work Areas in Long-Term Monitoring Tasks // Lecture Notes in Networks and Systems Том 228, С. 241 – 254.