Наш город прочно связан с темой полётов в космос и исследований внеземных объектов. В 1956 году десять молодых инженеров из первого выпуска Таганрогского радиотехнического института (ТРТИ, сейчас — ИТА ЮФУ) привлек к работам над космической программой СССР легендарный конструктор Сергей Королёв.
На рассвете космической эры отраслевые конструкторские бюро оказались перегружены заказами, и требовались динамичные организации, имеющие собственную конструкторско-производственную базу. В составе ТРТИ, которым тогда руководил профессор (в последствии академик РАН) Анатолий Каляев, создали ряд новых подразделений (ОКБ ТРТИ — позже НКБ «МИУС»), НИИ МВС), которые успешно вели работы по космической тематике.
Свой стартовый «космический» заказ ОКБ ТРТИ получило от Особого конструкторского бюро Московского энергетического института (ОКБ МЭИ). Ученым поручили произвести разработку гибридно-плёночных микросхем частного применения «Луна» и организовать изготовление этих микросхем мелкими сериями на своей производственной базе.
Весомый вклад в изучение Луны внес Научно-исследовательский институт многопроцессорных вычислительных систем (сегодня институт носит имя академика А.В. Каляева). С 1983 по 1988 годы здесь выполнялись научно-исследовательские работы по созданию систем управления роботов-планетоходов под руководством академика РАН, профессора Игоря Каляева.
В 80-е годы прошлого века наши сотрудники выполнили цикл работ по созданию интеллектуальной (в те времена такие слова еще не применяли) системы управления роботом-марсоходом, — рассказывает научный руководитель направления ЮФУ Игорь Анатольевич Каляев
Он объясняет: когда в начале 70-х годов прошлого века СССР осуществил успешную программу доставки на поверхность Луны роботов-луноходов, проработавших на ее поверхности длительное время, роботами управляли с Земли. После успешного завершения лунной миссии появилась идея создания робота для исследования поверхности Марса. Управлять роботом-марсоходом с Земли не получилось бы: время задержки передачи сигнала-команды из-за большого расстояния могло достигать более 10 минут.
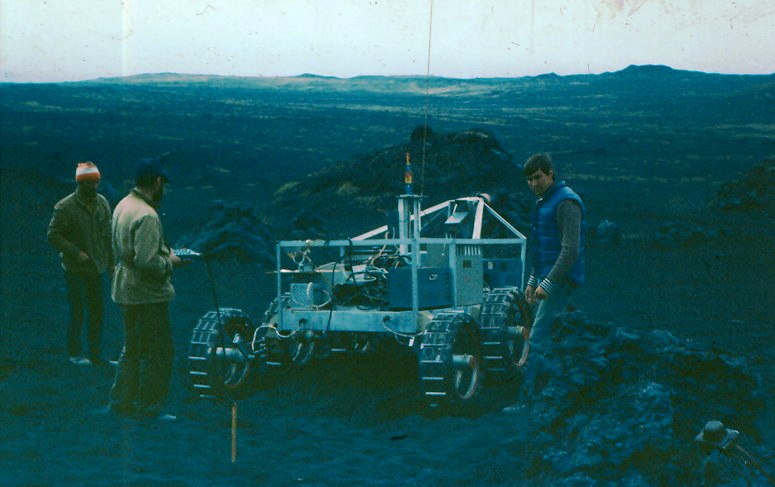
Нам поставили крайне необычную в то время задачу — создать робота, который смог бы без участия человека-оператора двигаться в заданную точку по заранее неисследованной пересеченной местности. Мы такую систему создали, провели несколько её успешных испытаний на специальных полигонах на Камчатке возле вулкана Толбачек, в радиусе от которого более 20 км все покрыто пеплом. Место идеально подходило для имитации марсианской поверхности. Созданная система обеспечивала сбор информации о поверхности, по которой происходило движение, с помощью сканирующего лазерного дальномера, на основе информации создавалась цифровая карта местности
Далее эта карта отображалась в однородную нейроноподобную структуру, в которой параллельно моделировались варианты движения робота к цели, и выбирался оптимальный вариант, после чего робот осуществлял соответствующее движение. Так появилась первая в мире система автономного движения робота-планетохода. В системе управления робота-марсохода таганрогские ученые первые в мире использовали аппаратно реализованную нейроноподобную вычислительную структуру.

Для решения поставленной задачи разработали и создали специальную микросхему (чип), содержащую 128 нейроноподобных элементов, а также выполнили микросборку на ее основе, содержащую 8 таких чипов (то есть в одном корпусе находились 1024 нейроноподобных элемента). Между прочим, первые микросхемы нейронных структур за рубежом появились на 10 лет позже! К концу 80-х годов робота практически подготовили к полету, однако развал СССР остановил эти уникальные, не имеющие аналогов разработки.
Результаты, полученные благодаря нашей работе по созданию робота-марсохода, мы смогли использовать позже, при реализации международной программы «МАРС 93-96», в рамках которой создавалась специальная платформа для высокоточной съемки поверхности «красной планеты». Мы отвечали за высоконадежную систему управления и стабилизации этой платформы, — дополняет Игорь Анатольевич
Источник: Таганрогская правда