В Таганроге находится большое количество научно-исследовательских институтов. Большинство из них были созданы при ТРТУ или его выпускниками (НИЦ супер-ЭВМ и нейрокомпьютеров, НИИ МВС, ОКБ «РИТМ», НКБ «МИУС», НКБ ВС и другие). Один из самых больших из них: Научно-исследовательский институт многопроцессорных вычислительных систем имени академика А.В. Каляева.

К началу 70-x годов успешное выполнение научно-исследовательских работ в области специализированных цифровых вычислительных машин и в области микроэлектроники сделало Таганрогский радиотехнический институт ведущим вузом среди вузов СССР в этих научных направлениях.
В ТРТИ был разработан первый в СССР цифровой дифференциальный анализатор «Метеор-1»(устройство для математического моделирования и решения систем дифференциальных уравнений). Испытания и опыт эксплуатации ЦДА показали простоту программирования задач, достаточно высокую точность их решения до 45 десятичных знаков и скорость решения, превышающую скорость вычисления этих задач на имеющихся в то время цифровых вычислительных машинах.
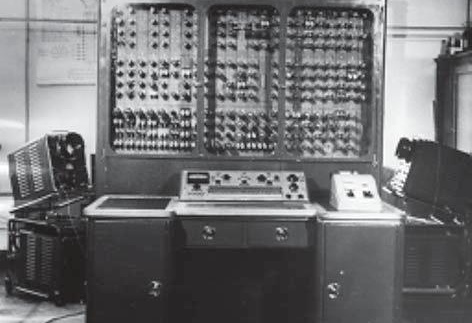
В 1964 г. была разработана и создана на транзисторной технологии первая в СССР и в мире цифровая интегрирующая машина «Метеор-3».Производительность новой ЦИМ была одной из самых высоких среди существующих тогда ЦВМ (цифровая вычислительная машина) составляла более 3 миллионов операций в секунду.

Но уже в начале 70-х встал вопрос о необходимости создания нового подразделения ТРТИ, призванного объединить кафедры микроэлектроники и вычислительной техники. Анатолий Васильевич Каляев, Леонард Николаевич Колесов, Аскольд Николаевич Мелихов и другие видные учёные обратились к правительству и министерству радиопромышленности с просьбой о создании в ТРТИ Научно-исследовательского института однородных микроэлектронных вычислительных структур.

В 1972 году советом министров РСФСР было принято постановление об организации при Таганрогском радиотехническом институте НИИ ОМВС, позже в переименованного в НИИ МВС.
В НИИ работало более 450 сотрудников, в том числе более 100 докторов и кандидатов наук, про многих из которых можно написать отдельную статью. Область научных разработок НИИ МВС очень обширна. За 30 лет работы были созданы концепции и архитектуры построения суперкомпьютеров, нейропроцессорных сетей, разработаны алгоритмы функционирования интеллектуальных систем управления роботов. Робот сам находил путь к цели в заранее неизвестной среде с препятствиями и запоминал этот путь. При изменении расположения препятствий автоматически корректировался путь к цели.

Проведено множество других прикладных научно-исследовательских и опытно-конструкторских работ, среди которых можно отметить такие как: Действующий образец универсального моделирующего комплекса для нейрокибернетических исследований. Первая в мире БИС цифрового нейропроцессора. Структура нейропроцессора могла программироваться на реализацию различных типов нейронов.
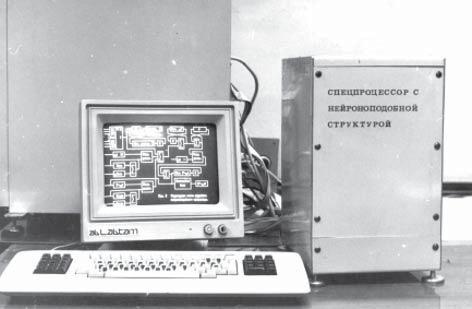
В 1992 г. разработан и изготовлен экспериментальный образец первого в мире параллельного мультинейропроцессорного цифрового нейрокомпьютера с программируемой архитектурой в виде комбинированной нейрокомпьютерной системы.
С развалом СССР финансирование НИИ МВС (как и вообще всего в стране) уменьшилось. Однако институт не распался, исследования продолжались:
- На основе ПЛИС-технологии в НИИ МВС был разработан и создан ряд РВС в том числе: модульно-наращиваемая РВС «Медведь» в составе 4-х базовых модулей с производительностью 200 Гфлопс в объеме 40 дм3.
- Блок РВС-0.2-ВБ (400 Гфлопс) для создания высокопроизводительных вычислительных систем и многое другое.
НИИ МВС занимал (и в некоторых областях занимает и по сей день) лидирующие позиции в нашей стране. В суперкомпьютерной отрасли, в области разработки и создания систем управления с элементами искусственного интеллекта, а также в области нейропроцессорных структур и сетей, используемых в системах управления роботами.